


Robot industriale a sei assi ad alta velocità per il taglio di lastre metalliche
TSR070-07-A Utilizzando una struttura simmetrica dei bracci, non è facile generare vibrazioni. Il quarto, quinto e sest
Descrizione
Informazioni di base
| Modello numero: | TSR070-07-A |
| Utilizzo | linea di produzione 3c |
| funzione | saldatura |
| carico utile | 6 kg |
| Pacchetto di trasporto | Imballaggio in legno |
| specifica | TSR070-07-A |
| marchio | Topstar |
| Origine | La Cina continentale |
| Codice HS | 8428904000 |
| Capacità produttiva | 1000 |
Descrizione del prodotto
TSR070-07-ALa struttura simmetrica dei bracci rende difficile la generazione di vibrazioni. Il quarto, quinto e sesto asse adottano un riduttore cavo ultrasottile, piccolo e raffinato, che consente il funzionamento in uno spazio ridotto.
Caratteristica speciale
Ad alta velocità
Alta precisione
Elevata stabilità
Forte scalabilità
Tecnologia di controllo del movimento del software
Combinazione di controllo e visualizzazione
Sistema di controllo del bus EtherCAT
installazione facile
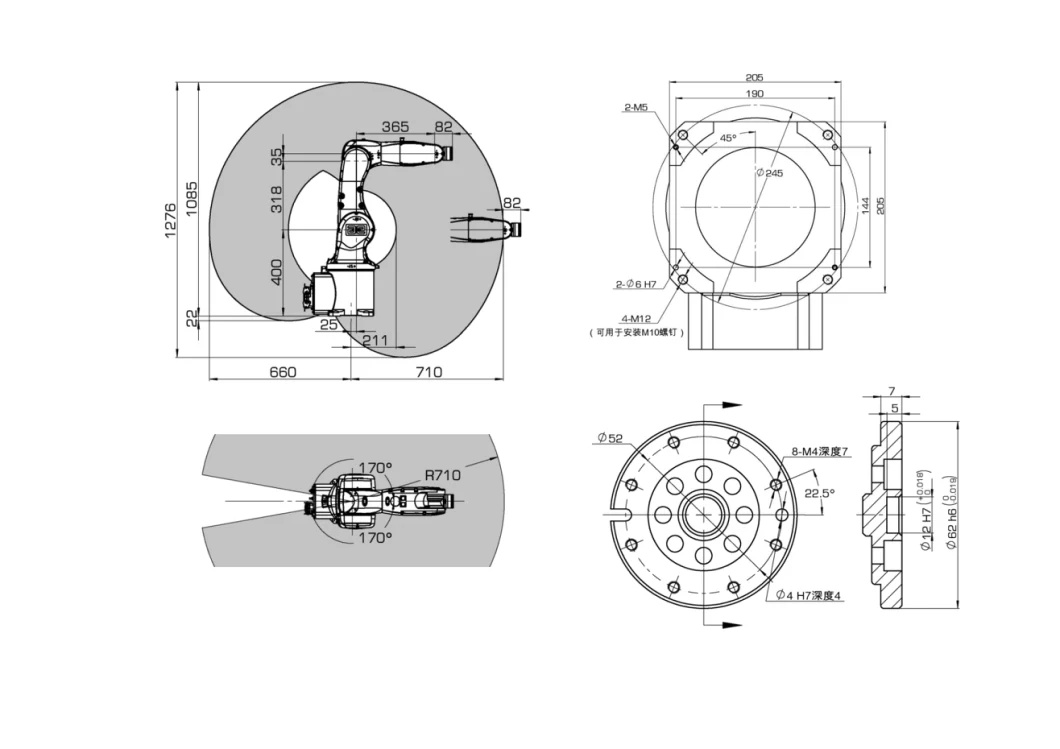
specifica
| Modello di robot | TSR071-06-A/TSR070-07 |
| Forma delle braccia | Multigiunto verticale |
| Libertà di movimento | 6 assi |
| carico utile | 6 kg |
| Ripeti la precisione di posizionamento | ±0,02 mm |
| Sollevamento massimo | 710 mm |
| peso corporeo | 45 kg |
| Metodo di installazione | Ogni angolo |
| Livello IP | IP65 |
Posto di lavoro

Armadio di controllo1. La tecnologia di controllo del bus EnterCAT utilizza il bus EnterCAT come linea di comunicazione per l'intero sistema, con elevata stabilità, elevata velocità di trasmissione, cablaggio semplice e facile espansione2. Kernel in tempo reale WINDOWSPC+kernel in tempo reale+tecnologia di controllo software per garantire funzionamento e compatibilità fluidi, risparmio sui costi del 40%3. Potenti funzioni di simulazione: simulazione online in tempo reale e funzione di simulazione della programmazione offline per proteggere l'uso sul campo, migliorare l'efficienza della programmazione del 50% e ridurre il tasso di fallimento del processo operativo. (Sistema di controllo robot domestico unico)4. Kernel di controllo del movimento del software Ricerca e sviluppo completamente indipendenti di algoritmi di controllo del movimento dei robot per padroneggiare la tecnologia di base e garantire la continua competitività del mercato senza costi elevati.

Regole
- Focus sulla tecnologia di servocontrollo dei robot
- Funzione Soft-SPS
- Ampie funzioni periferiche


Indietro: Direttamente dalla fabbrica robot di sigillatura bicomponente per vetri isolanti con doppia fila
Prossimo: Analizzatore cutaneo dermatoscopio medico portatile portatile
Il nostro contatto
Spedisci ora




